






















روبوت يستخدم تقنية السي أن سي للكتابة أو الرسم
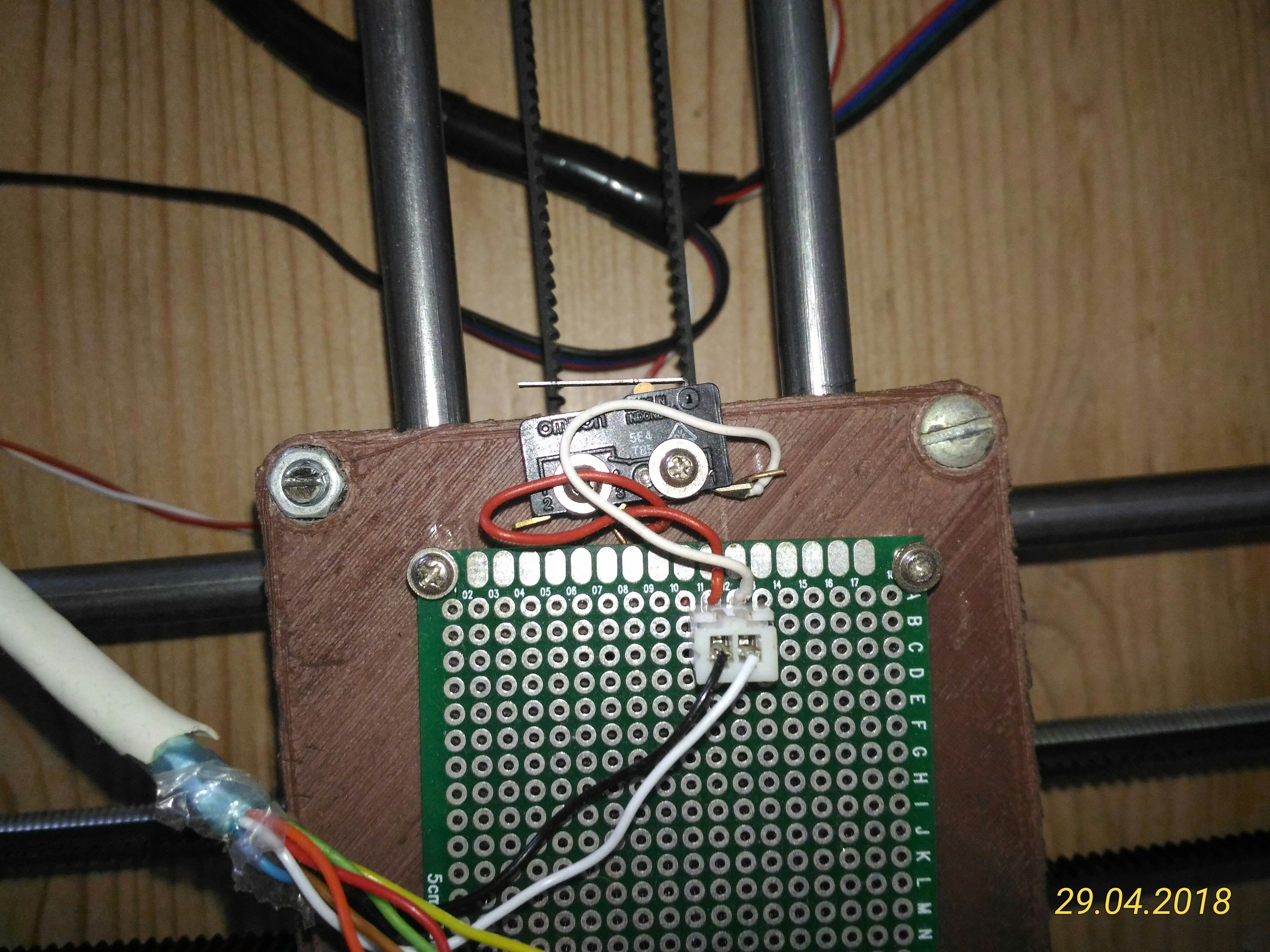
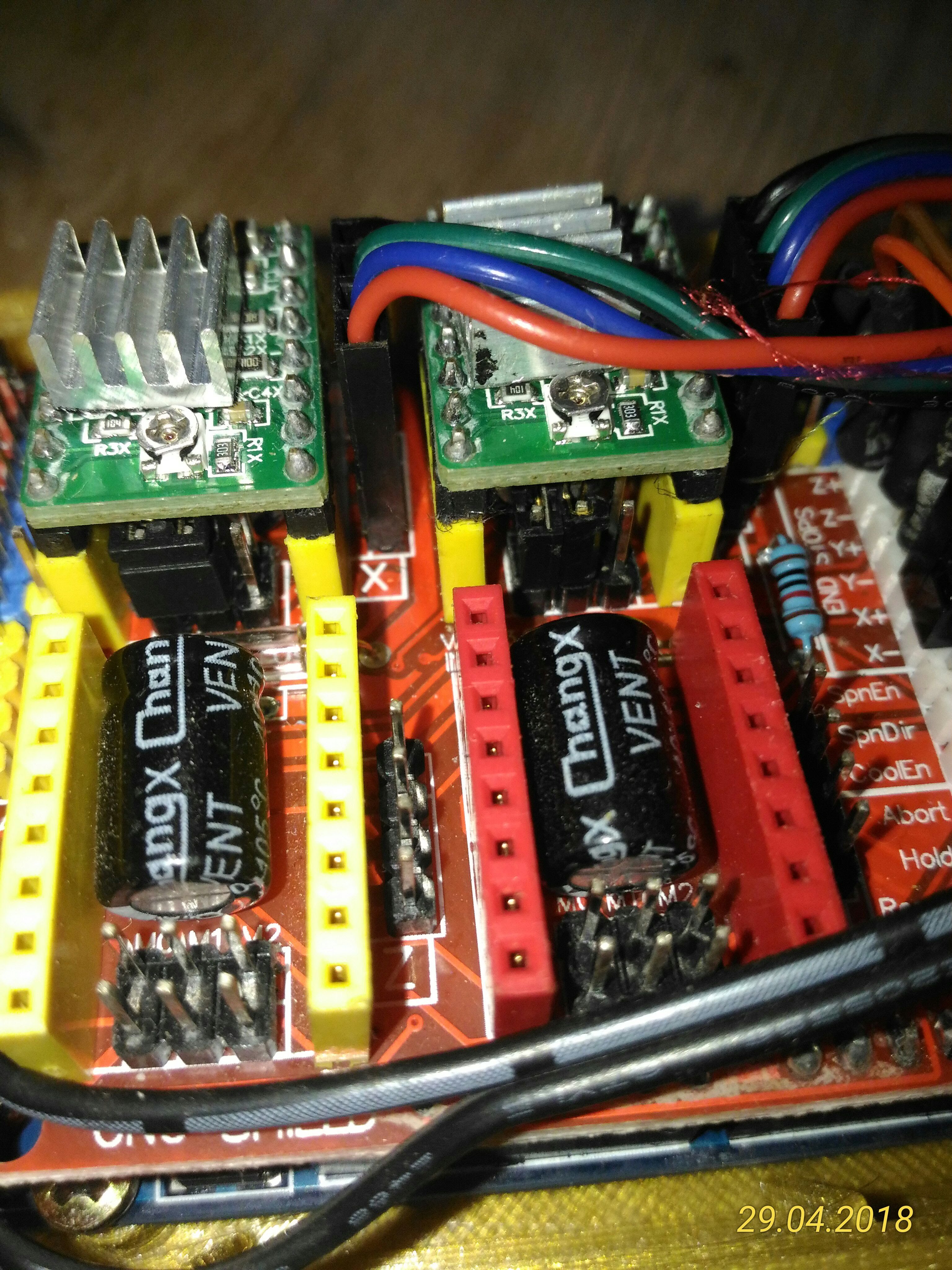
أجزاء الروبوت
الإعدادات
Arduino software setup
عليك تنزيل برنامج الأرديونو أي دي أي من (هنا) عليك أن تنسخ مجلد grbl-coreXY-servo-master إلى مكتبة الأرديونو التالية
document/arduino/libraries/
ومن ثم يمكنك تشغيل ملف الأونو الموجود في ملف Examples و تحميل البرنامج إلى الأرديونو
عليك تشغيل الأوامر التالية واحد بعد الآخر على الأرديونو تيرمينال لضمان عدم وجود أخطاء
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=0 (dir port invert mask:00000000)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.010 (junction deviation, mm)
$12=0.010 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=1 (hard limits, bool)
$22=1 (homing cycle, bool)
$23=3 (homing dir invert mask:00000011)
$24=25.000 (homing feed, mm/min)
$25=500.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=80.000 (x, step/mm)
$101=80.000 (y, step/mm)
$102=80.000 (z, step/mm)
$110=5000.000 (x max rate, mm/min)
$111=5000.000 (y max rate, mm/min)
$112=5000.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
$130=435.000 (x max travel, mm)
$131=255.000 (y max travel, mm)
$132=200.000 (z max travel, mm)
الآن الأرديونو أصبح جاهزا
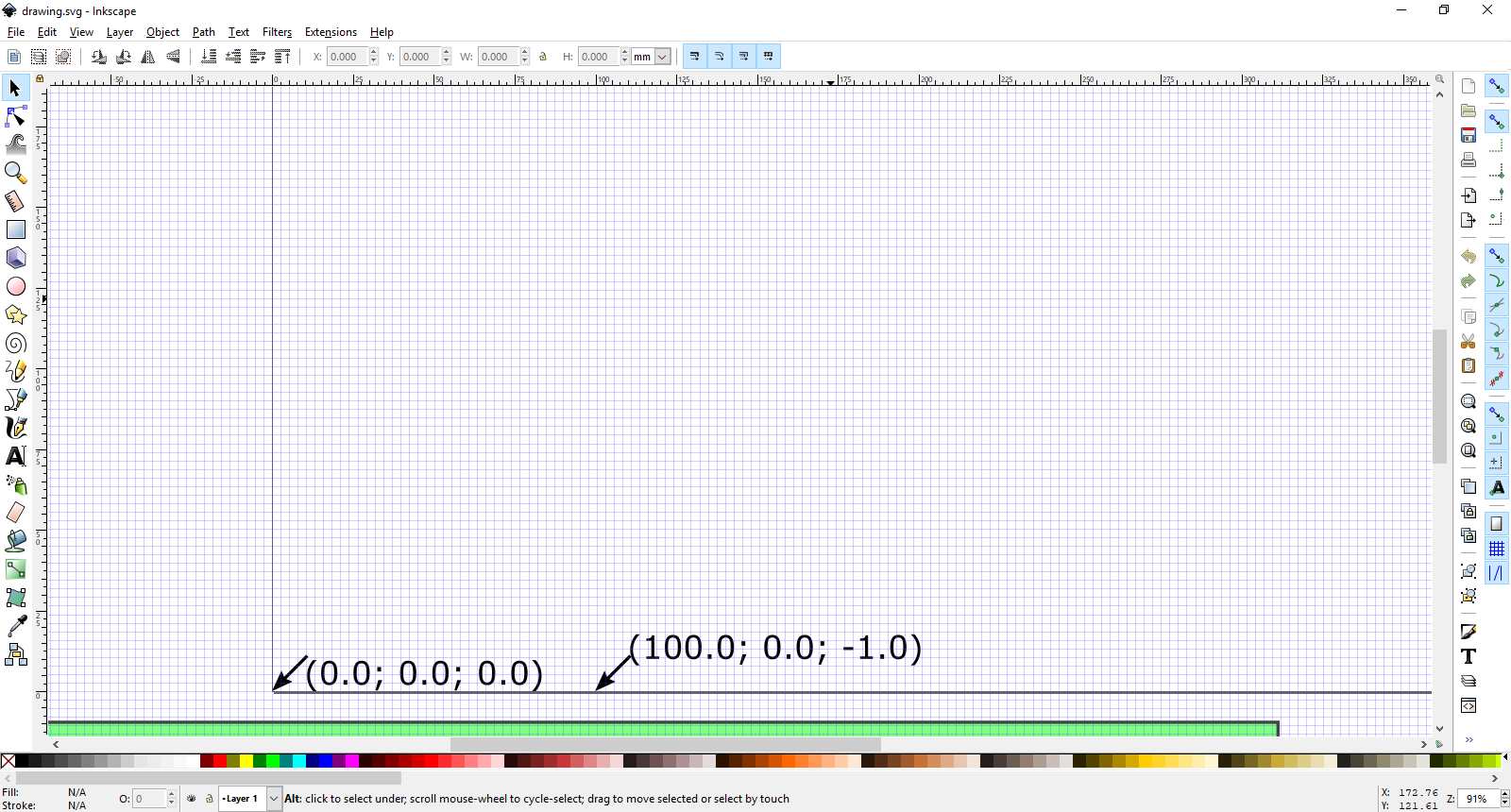
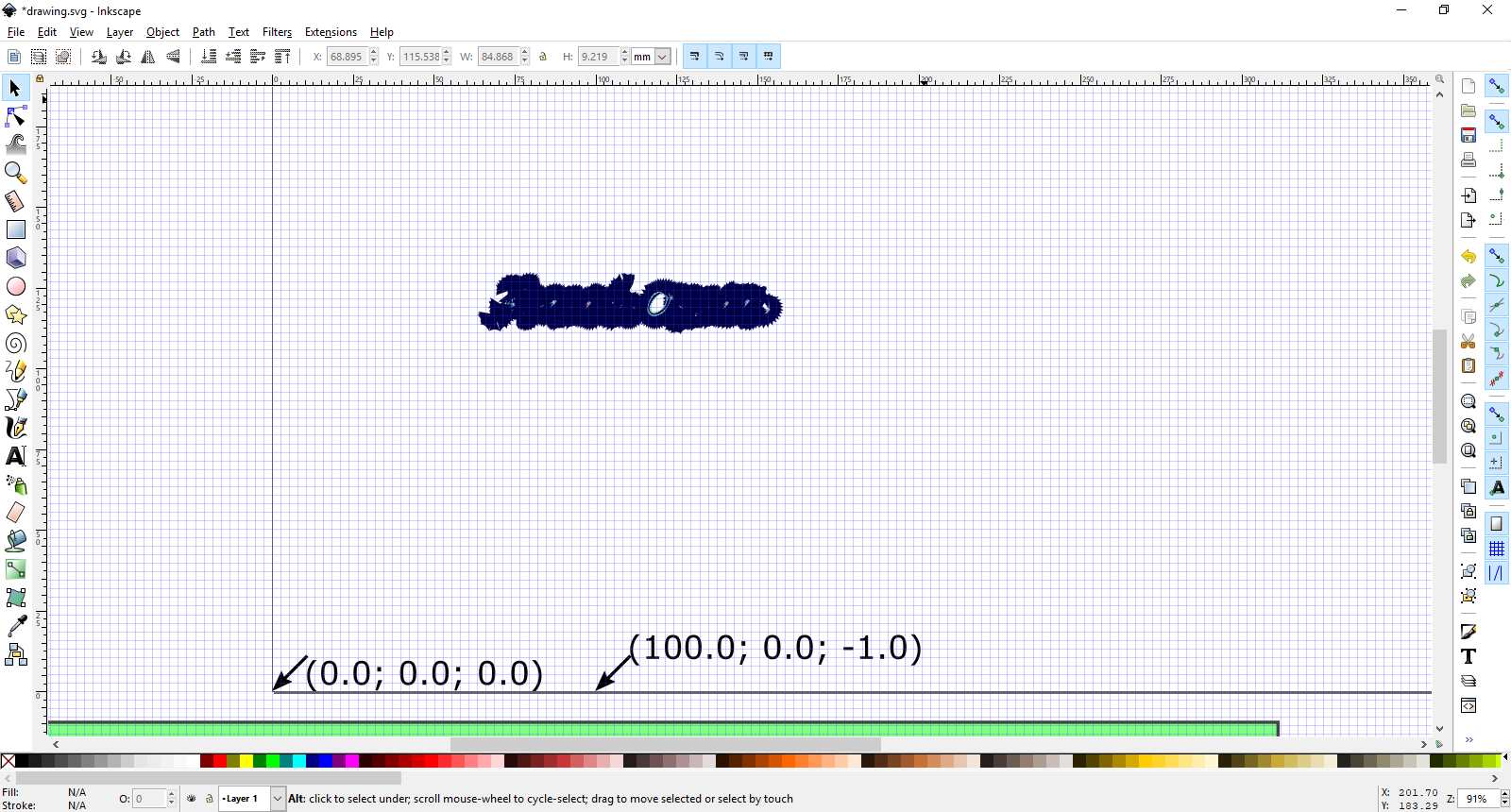
برنامج Inkspace
عليك تحمبل البرنامج من هنا ومن ثم يمكنك فتح ملف draw.svg الذي يحوي الاعدادات المطلوبة لأنشاء ملف جيوكود
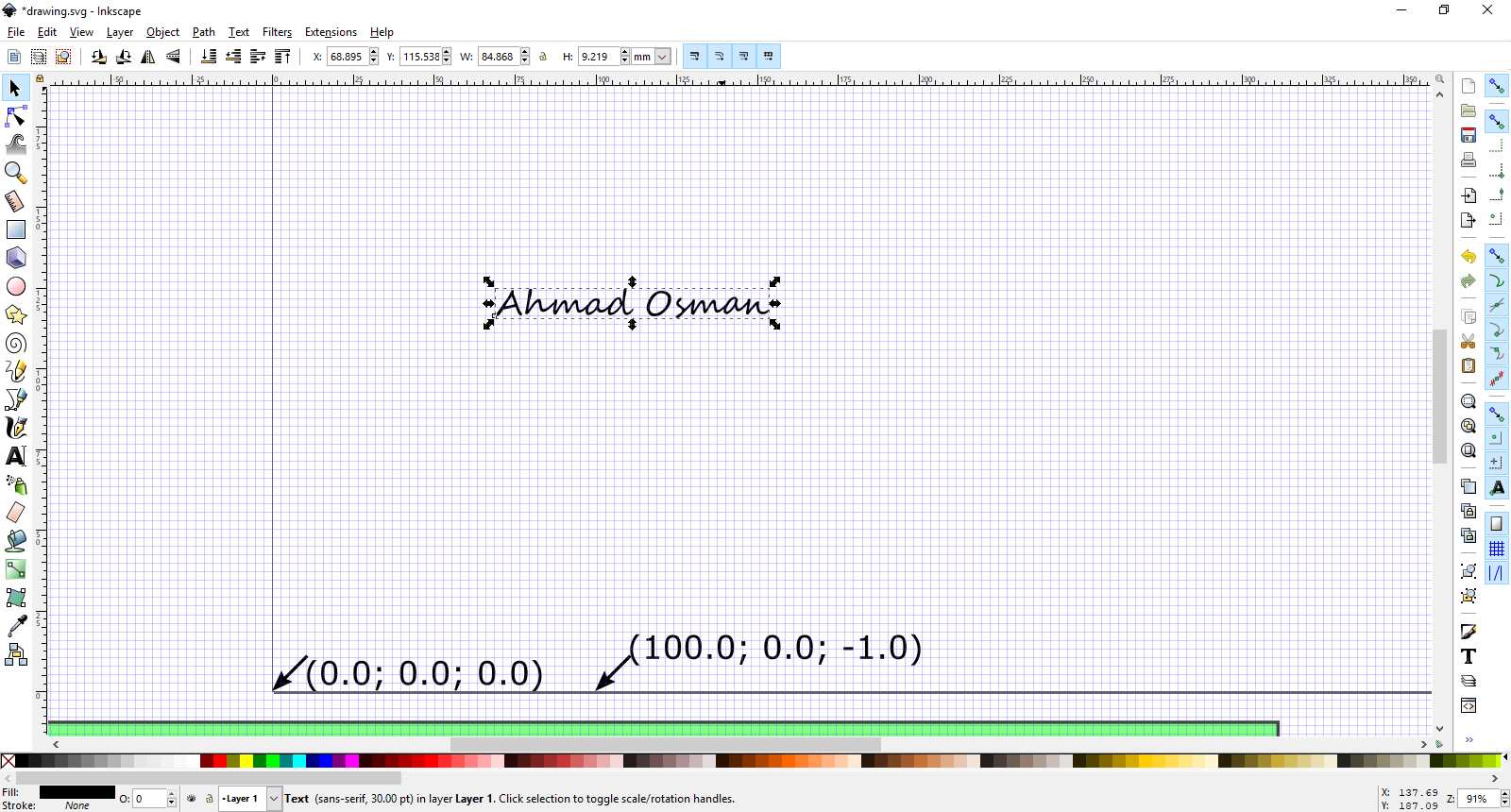
أكتب شيئا ما
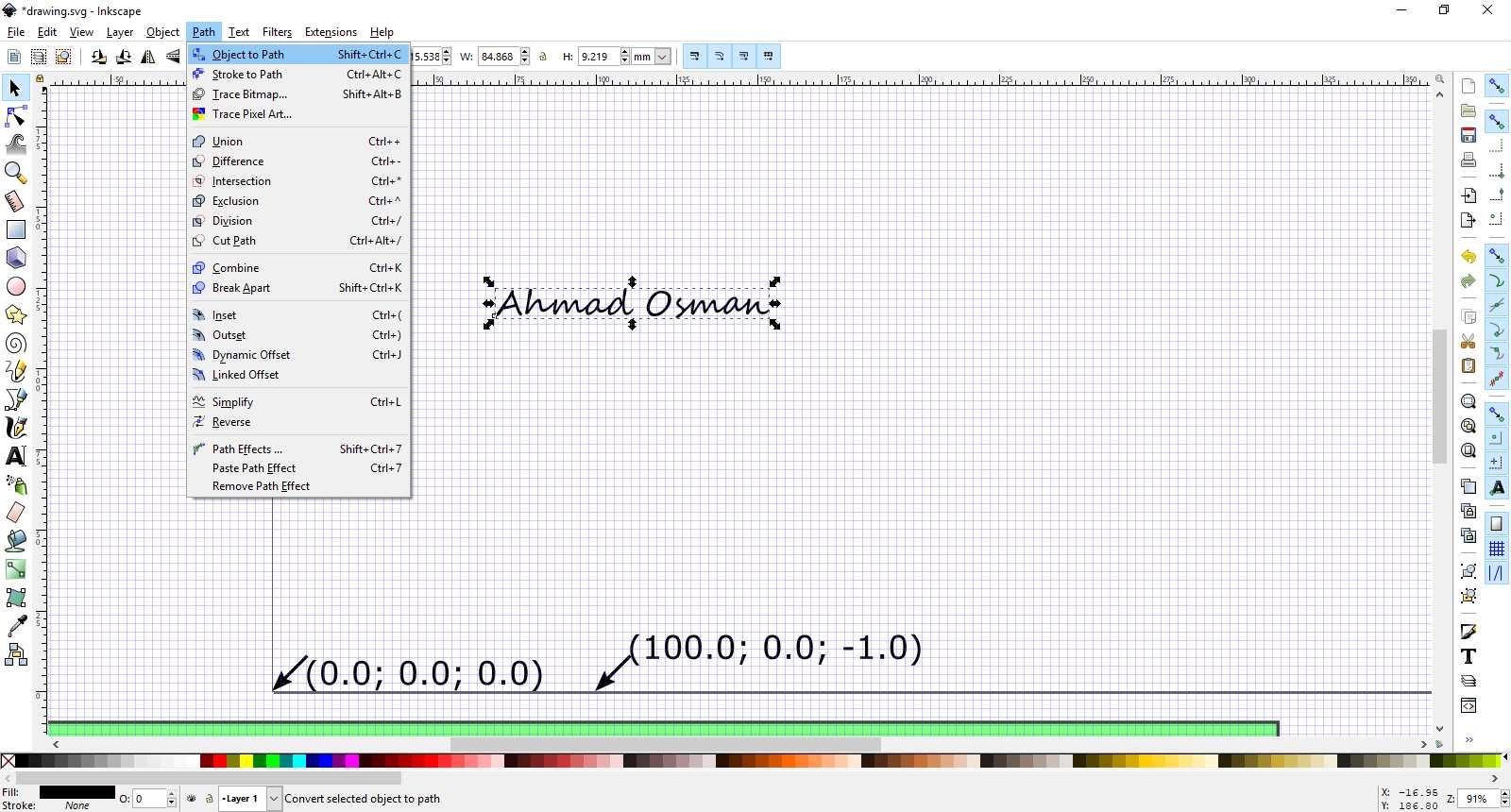
حول الكتابة السابقة لباث
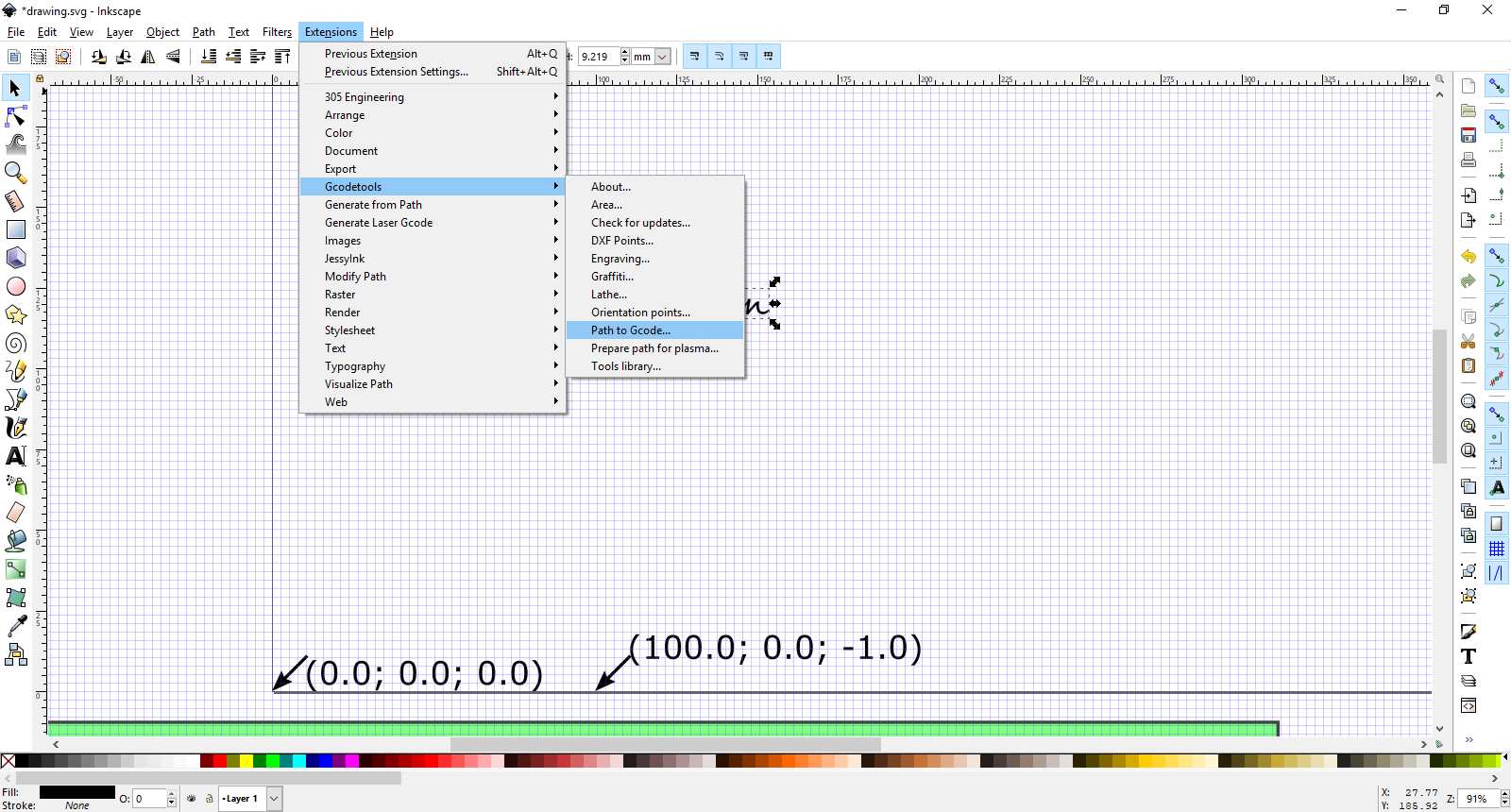
تصدير ملف جيوكود
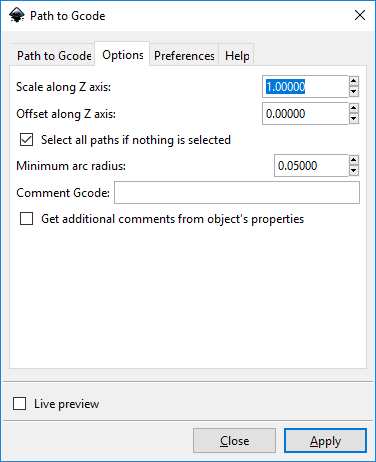
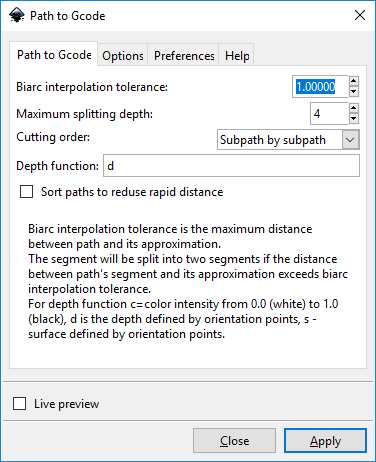
اعدادات تصدير إلى جيوكود
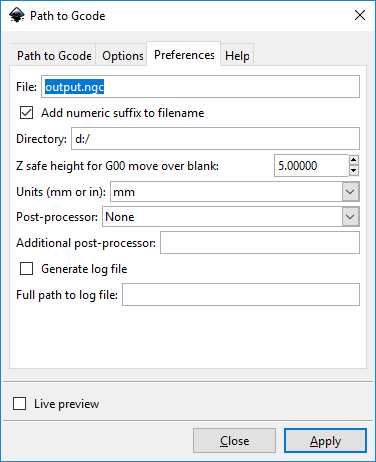
بعد الضغط على زر موافق انتظر عدة ثواني
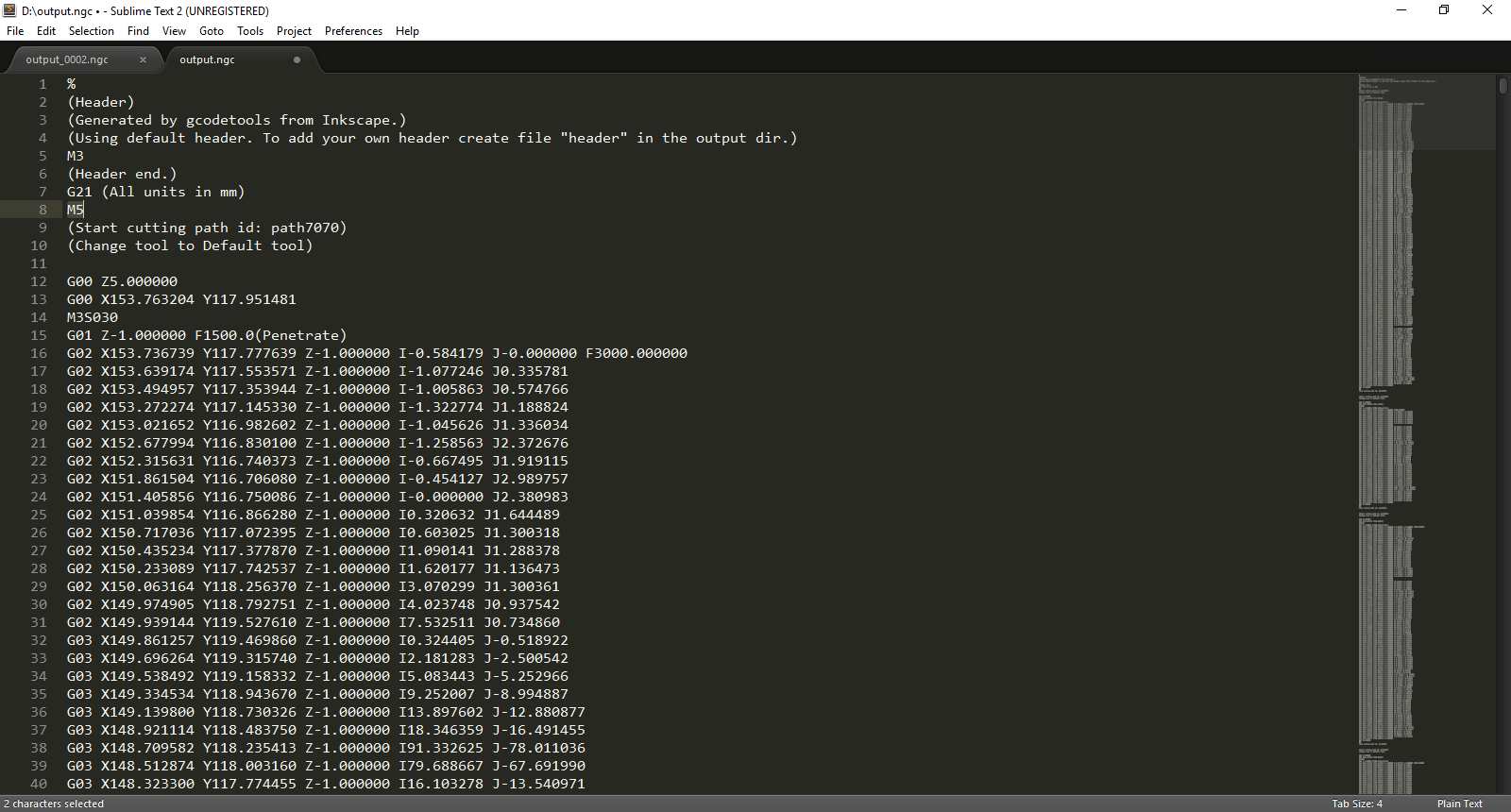
عليك تعديل ملف الجيوكود لجعل القلم يرتفع عند أول تشغيل للجهاز عن طريق كتابة التعليمة M5 بعد السطر السابع
أحفظ الملف ليصيح جاهزا للطباعة
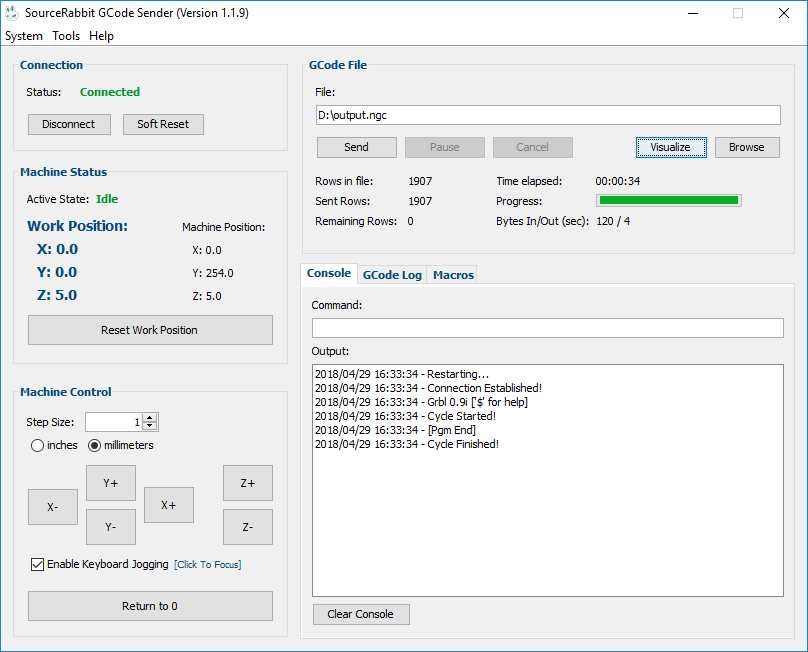
Sourcerabbit برنامج
عليك تحميل البرنامج من هنا بعد فتحه سوف يكتشف تلقائيا المنفذ الخاص بالأرديونو
يمكنك تشغيل أوامر الاعدادات السابقة عن طريق هذا البرنامج
شغل التعليمة $$ التي تعرض اعدادات grbl للتأكد أنها تطابق الاعدادات السابقة و فيما يلي بعذ الأوامر المفيدو
$$ (تعرض الاعدادات)
$H (تستعيد الجهاز للنقطة صفر )
M5 (ترفع القلم)
M3S030 (تنزل القلم)
اختر ملف الجبوكود و اضغط ارسال ليتم طباعته و استمتع بالمشروع
أضف تعليق