






















It is a robot uses a CNC with a pen to write or draw.
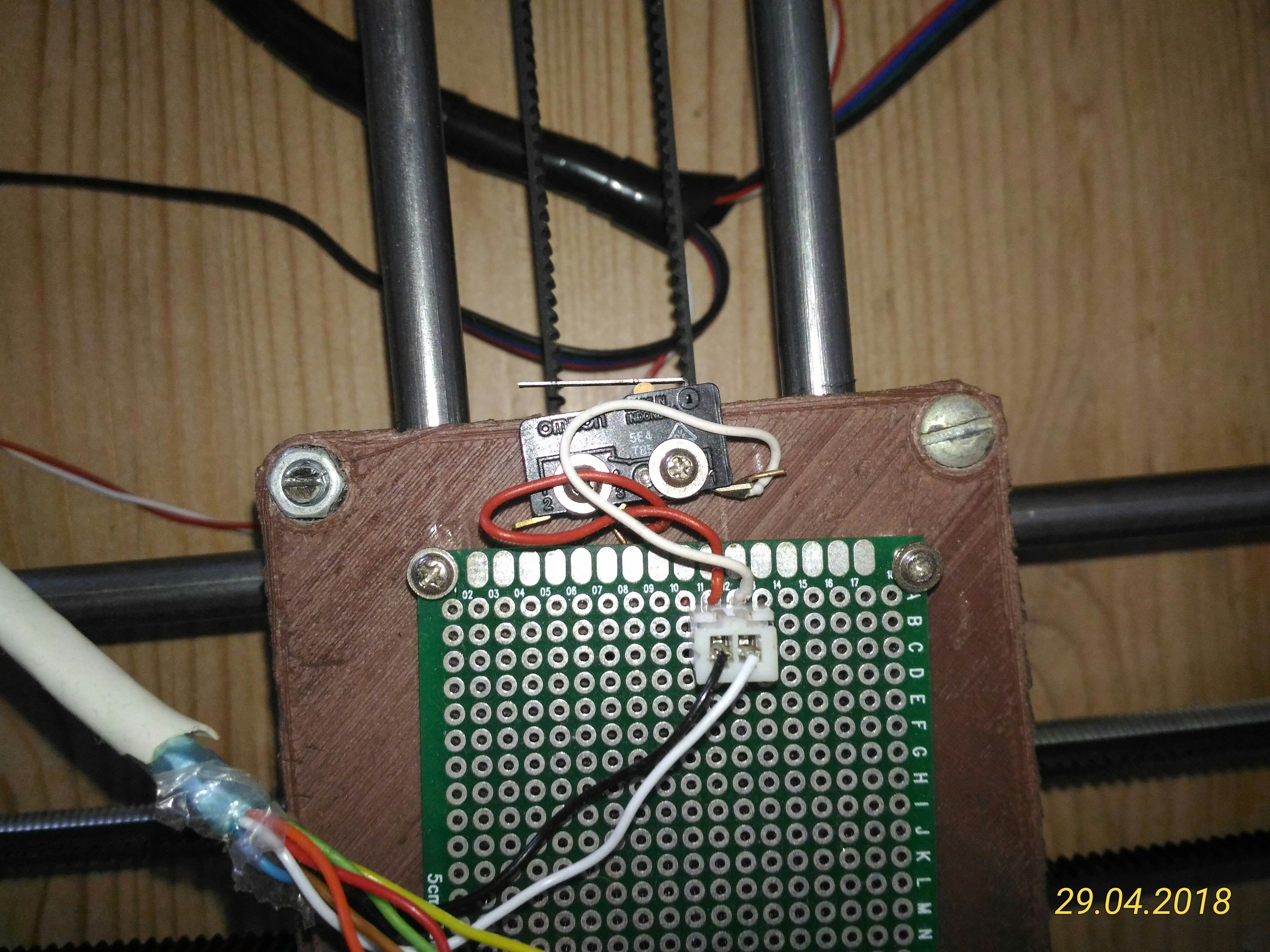
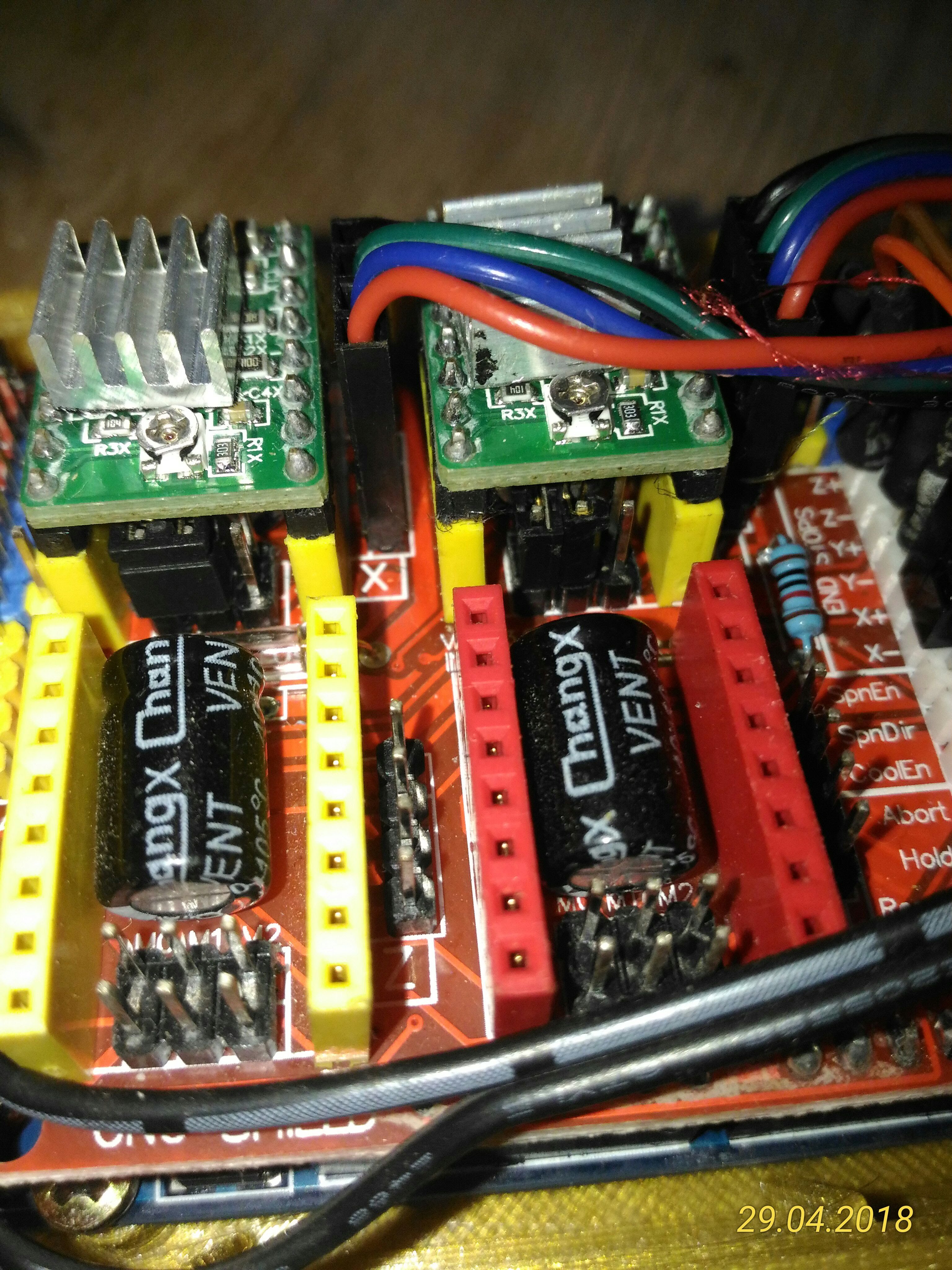
Robot parts
Setting Information
Arduino software setup
After install Arduino Ide (Here) you need to copy grbl-coreXY-servo-master folder to arduino lib folder
document/arduino/libraries/
then you can open the ino file in Example folder and upload the software to your arduino uno board
after that you need to run the following commands using arduino terminal (one by one to make sure there is no errors) to set the grbl settings
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=0 (dir port invert mask:00000000)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.010 (junction deviation, mm)
$12=0.010 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=1 (hard limits, bool)
$22=1 (homing cycle, bool)
$23=3 (homing dir invert mask:00000011)
$24=25.000 (homing feed, mm/min)
$25=500.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=80.000 (x, step/mm)
$101=80.000 (y, step/mm)
$102=80.000 (z, step/mm)
$110=5000.000 (x max rate, mm/min)
$111=5000.000 (y max rate, mm/min)
$112=5000.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
$130=435.000 (x max travel, mm)
$131=255.000 (y max travel, mm)
$132=200.000 (z max travel, mm)
now your arduino uno is ready
Work with Inkspace
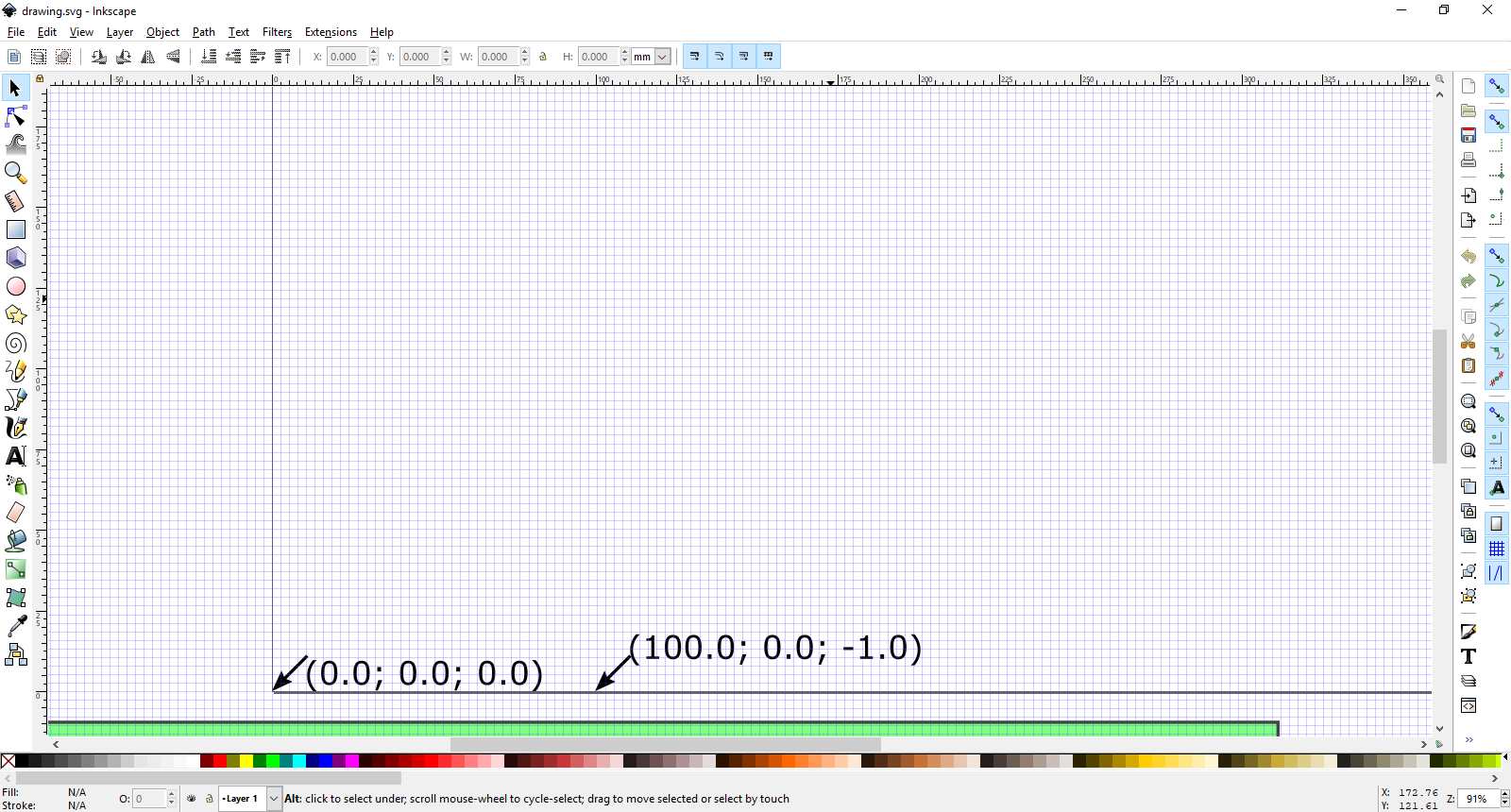
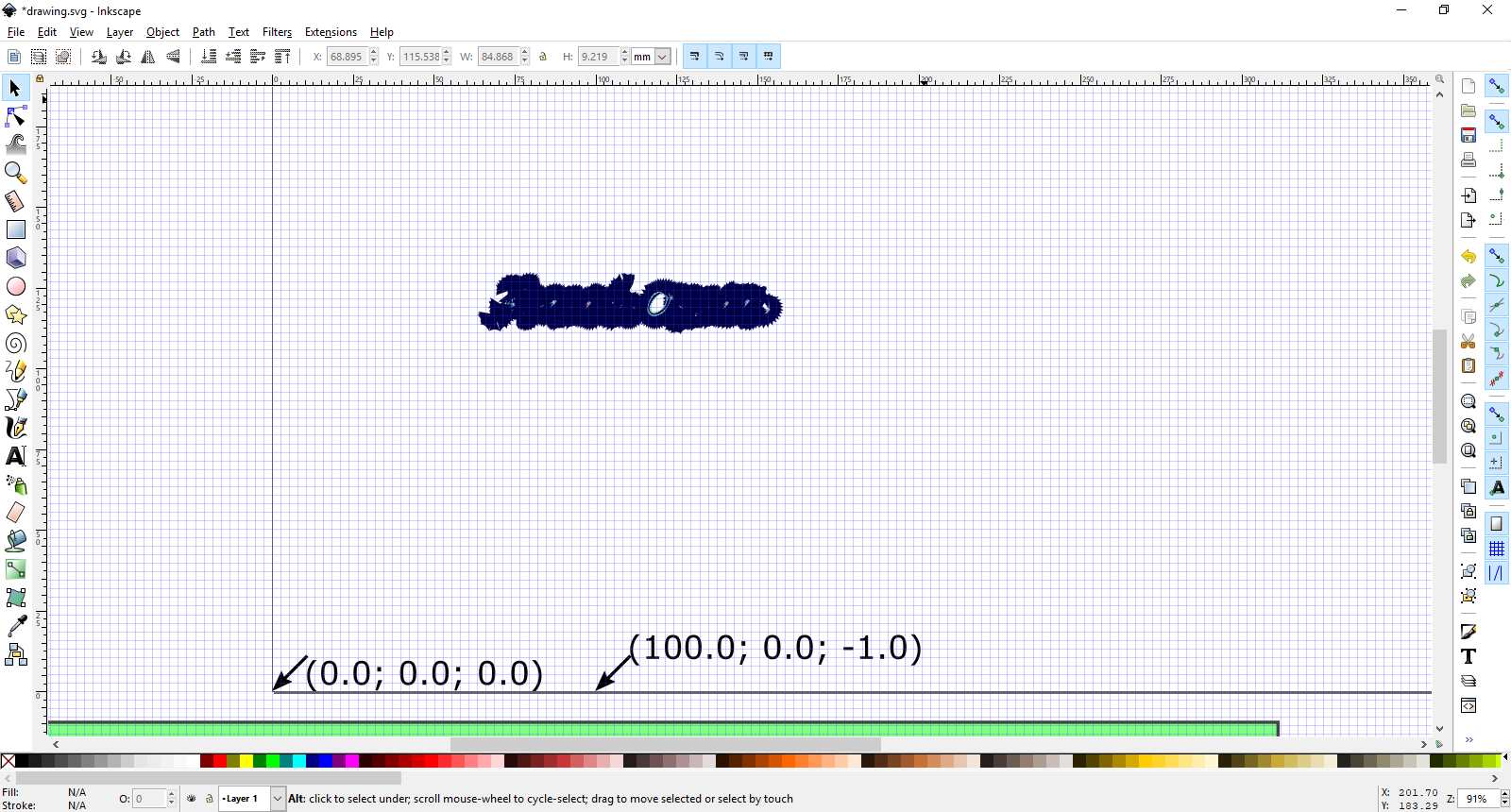
you need to install inkspace from Here then you can open the draw.svg file which contain an example and the setting that you need to generate gcode file using inkspace
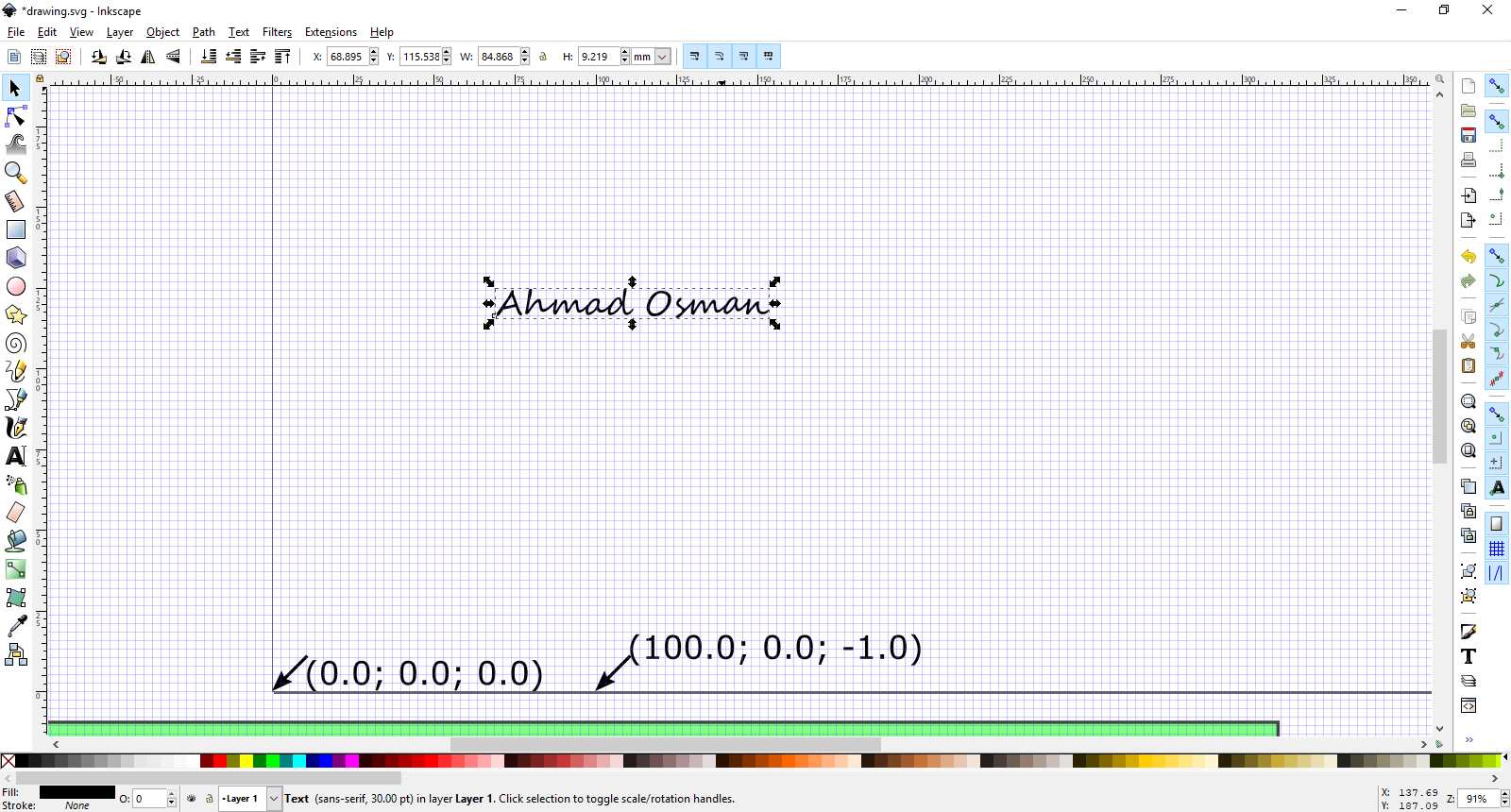
Write Somthing
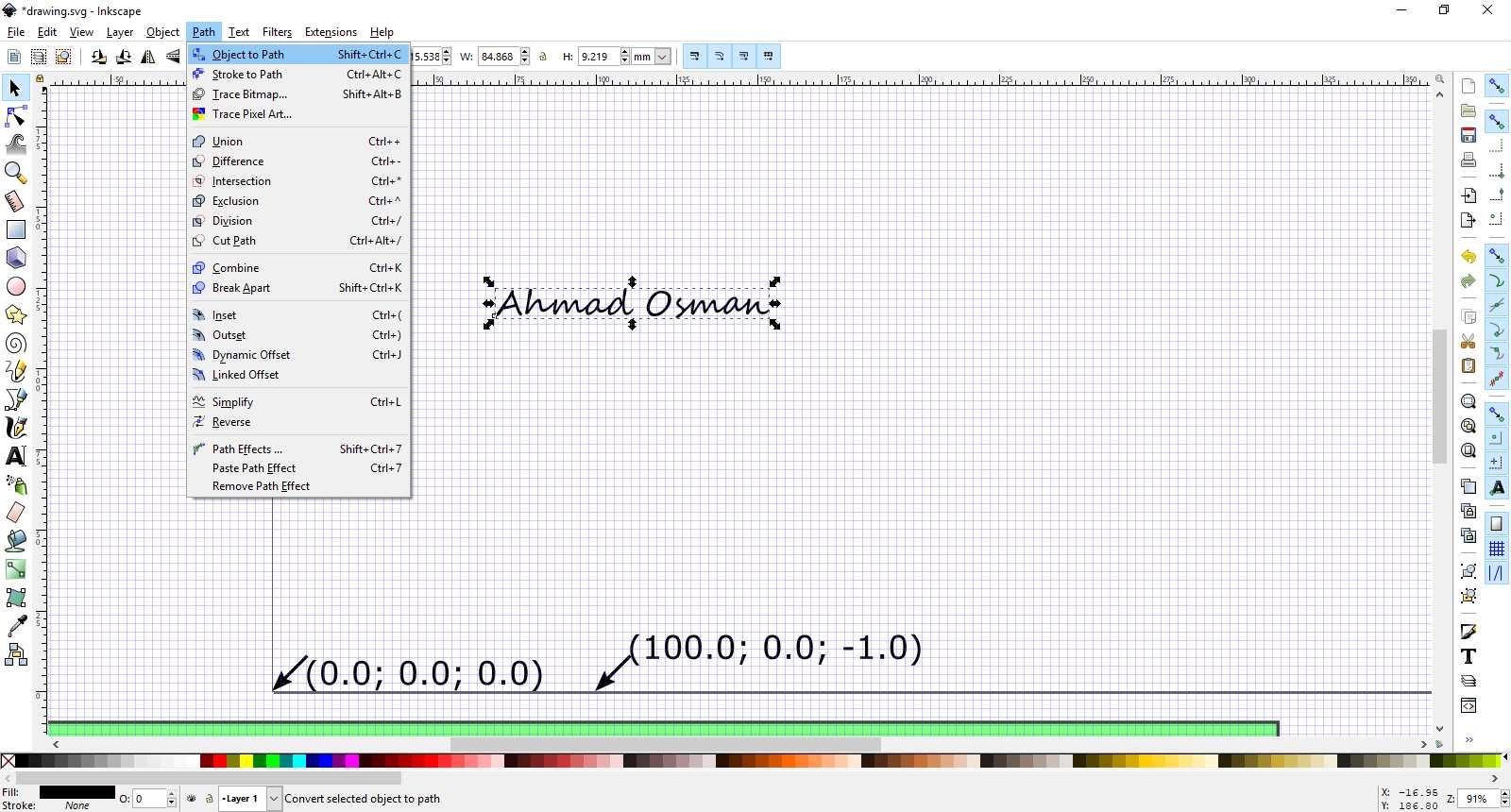
Convert object to path
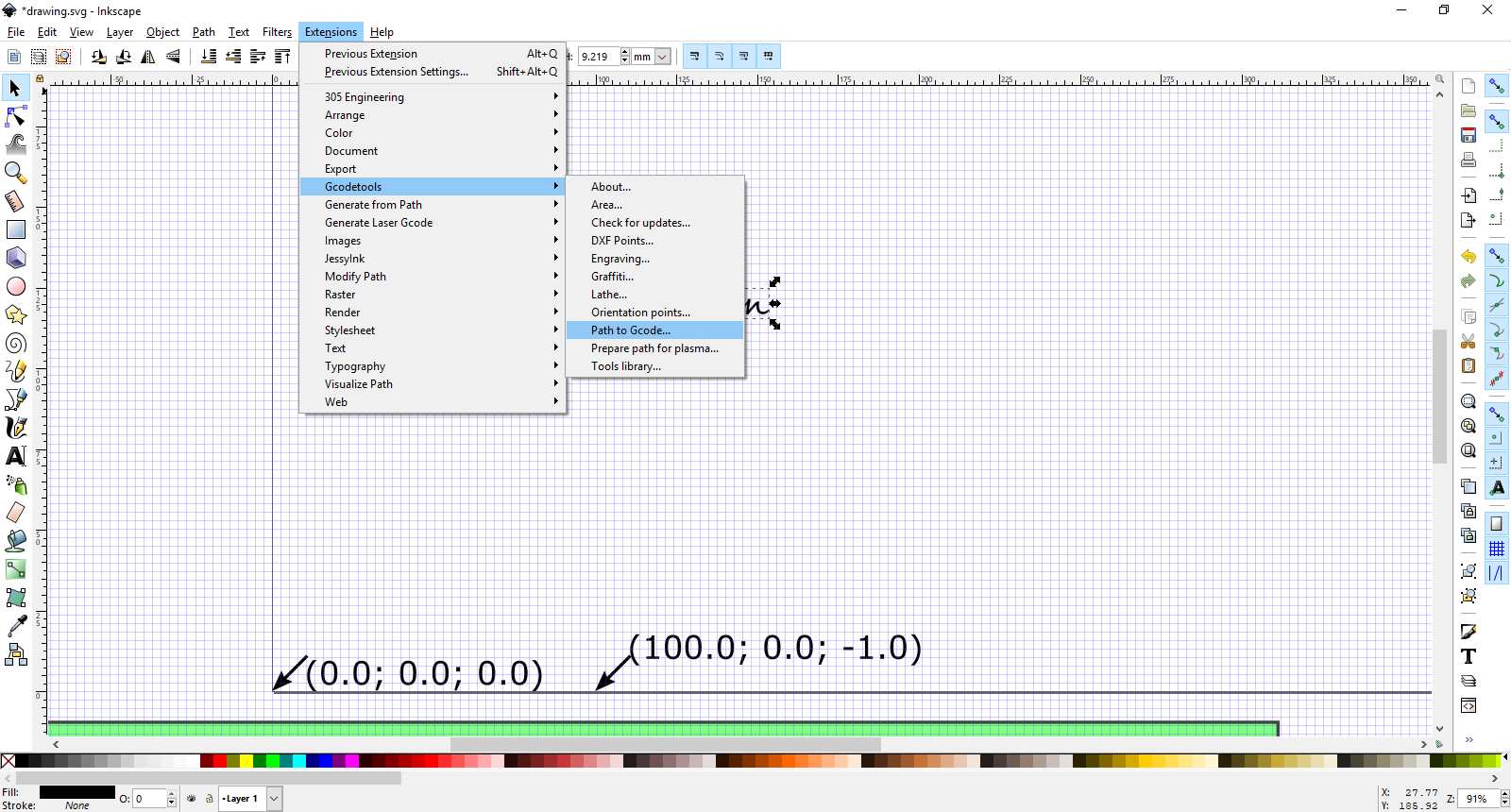
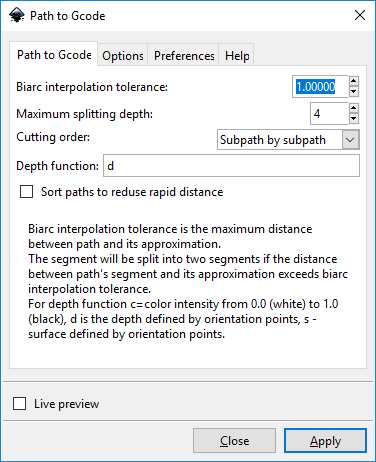
Generate gcode
Generate gcode sitting
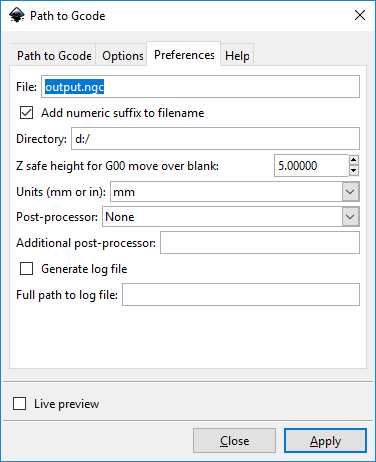
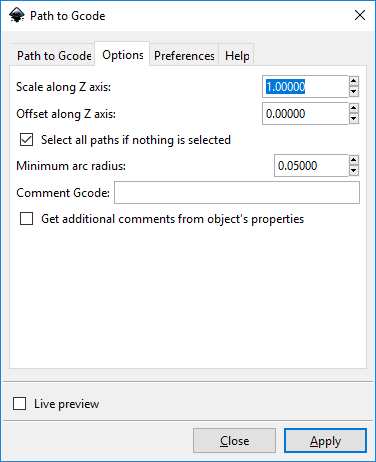
after click apply, it will take few seconds to generate gcode file and it will show like this
you have to make small change in the gcode file, after line 7 just write M5 , this command will rise the pen in the first run
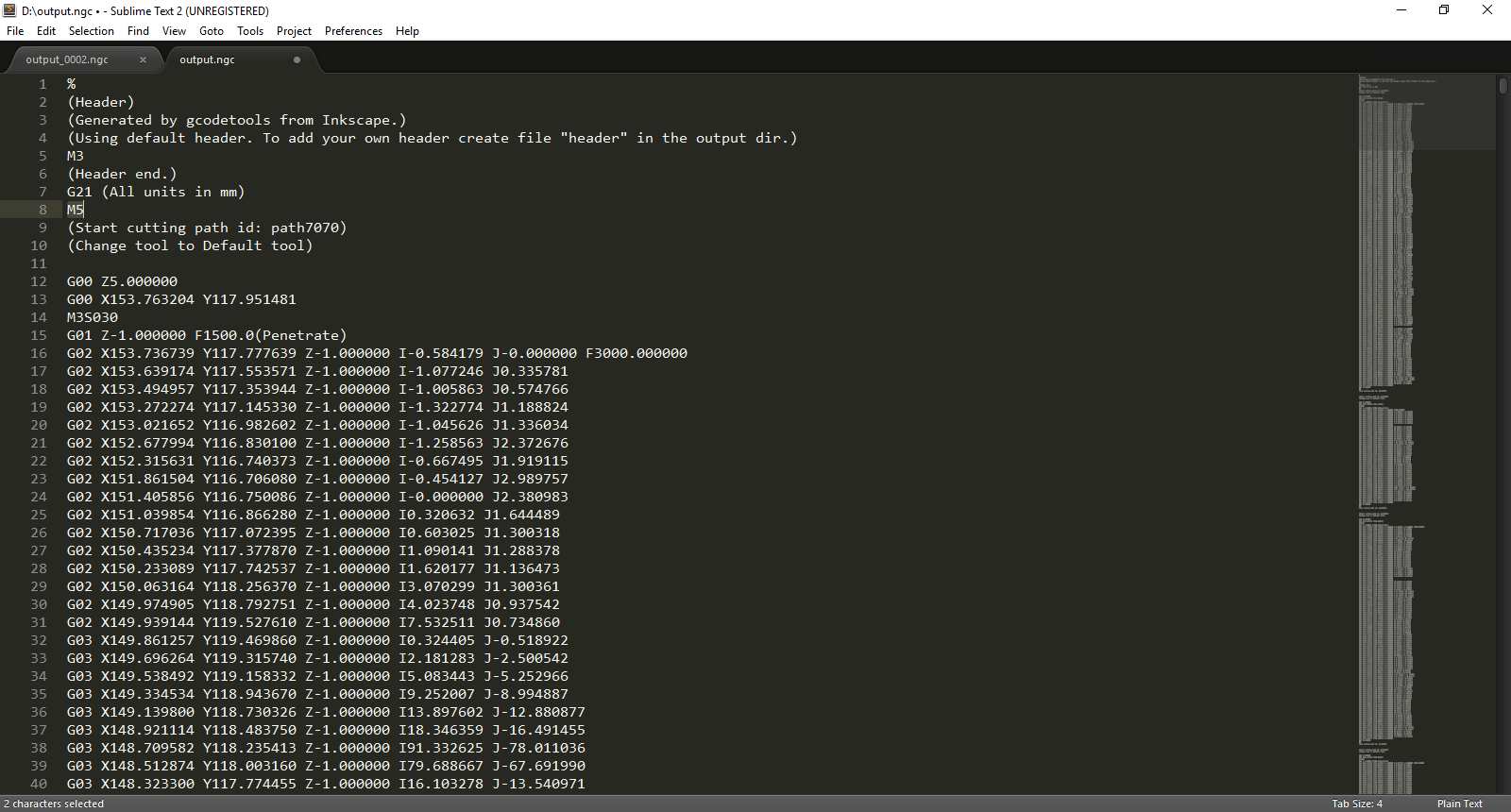
save the file and it is now ready to be printed
Sourcerabbit settings
you need to install Sourcerabbit from Here after open it, it will detect automaticly the port that arduino is connected to
you can run grbl setting command using sourcerabbit
run $$ command to check grbl setting are same with the last sitting, here are some useful commands
$$ (return grbl sittings)
$H (reset machine to 0,0 point )
M5 (rise the pen)
M3S030 (set the pen down)
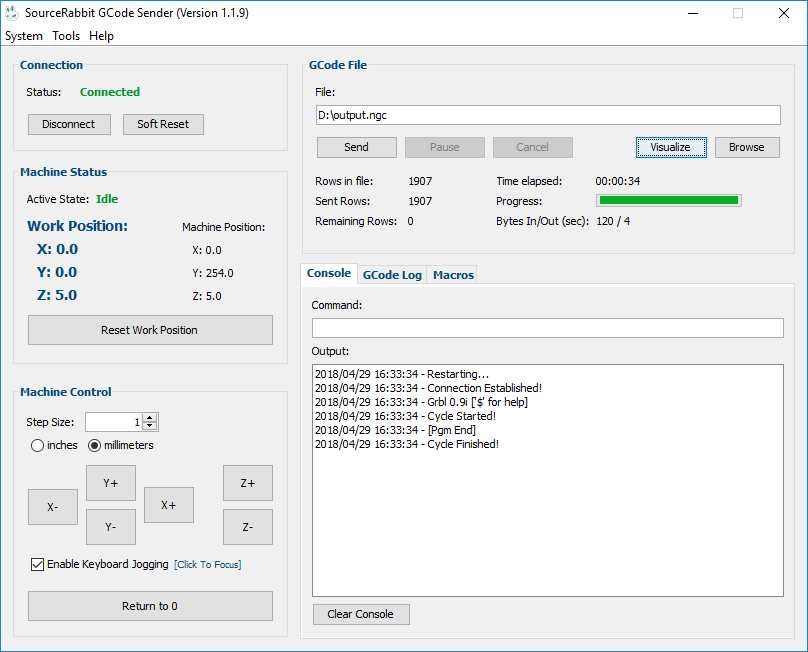
just choose the gcode file and send it to the machine and ENJOY
There are 1 comment
need help
Hello Ahmed, I have several questions about CNC writing robot. Please write my E-mail... I know Turkish but I made lots of mistakes when I writing Thanks ...